夜跑友好视角下城市街道环境视觉感知评价
摘要:【目的】随着现代生活方式的转变,城市居民对夜跑活动的需求日益增加。已有跑步环境研究较多关注日间情景,城市街道夜间环境对跑者的影响还有待进一步探究。
【方法】以广州越秀核心区为研究区域,利用计算机视觉和人机对抗评分平台评估不同类型街道对夜跑的安全感、恢复力、舒适度、吸引力及环境质量等方面视觉感知的影响,并运用空间自相关方法和地理加权回归模型研究各类街道环境要素与夜跑环境视觉感知之间的关系。
【结果】研究发现,滨水街道和商业街可提升夜跑者的舒适度和恢复力,历史文化街道可增强夜跑的安全感和吸引力,而餐饮街和商住混合区街道较难激发正面跑步体验。不同街道环境要素对夜跑环境视觉感知的影响存在差异。
【结论】考虑夜跑环境视觉感知评价对优化城市夜间跑步环境具有指导意义,未来可以通过区分街道类型,采取有针对性的规划设计措施来提升不同街道的夜跑体验质量。
日益丰富的夜间生活,为公众提供了更加多样的体力活动选择,其中夜跑活动作为缓解城市居民白天工作压力的一种健康生活方式,已逐渐在城市兴起并广受欢迎。而城市街道作为居民使用频率最高的户外活动空间[1-2],其环境质量已被证明对居民步行、骑行等体力活动有影响[3-10]。同时,许多研究也表明建成环境与体力活动适宜性感知存在密切联系[11-12],例如较低的建筑密度、开阔的自然景观及良好的道路连通性等对跑步及其他体力活动的吸引力和满意度具有积极影响[13-15],而公共汽车站数量则可能对骑行者的舒适度造成负面影响[16]。
然而,这些研究多基于白天情景,针对夜间城市环境与体力活动视觉感知的研究相对较少。虽然也有一些研究发现在夜间情景下,城市商业设施、公共交通的可用性及围栏、路灯等安全设施对行人的心理安全感和体验满意度有重要影响[17-19],但夜间环境要素与体力活动视觉感知的关系还不明确。因此,探究夜间情景下城市街道的夜跑环境视觉感知特征,对于创造夜跑友好型城市、鼓励居民参与体力活动具有重要意义。
传统的体力活动感知测量方法包括问卷、访谈、自我报告等[20-21],但由于耗时费力、规模受限及主观个体差异等因素,这些方法的适用性和可靠性常受到质疑。为了提高研究的效率和准确性,有研究者将街景图像数据集、众包和机器学习结合来探索建成环境与体力活动感知的关系[22]。然而已有研究多采用基于谷歌、百度和腾讯等提供的车载全景街景图像,拍摄视角和透视等难以真实反映人视角下的环境视觉感受。因此,有必要采集跑步者视角的夜跑视觉感知数据,以提高评价结果的可靠性。
在分析方法层面,已有研究使用多元逻辑回归模型和广义空间回归模型分析城市街道对体力活动的影响[23-24]。然而,这些研究在方法上较少关注不同空间的城市街道对体育活动产生不同程度影响的问题,导致建模偏差和重要的局部信息被忽略[25]。地理加权回归 ( geographically weighted regression, GWR) 模型已被证明可以检测空间异质性,允许分析每个变量影响下的空间变化[26]。因此,GWR模型能够进一步揭示体力活动感知与街道环境关系的空间异质性特征[26-28],尤其是关于夜跑环境视觉感知与街道环境要素之间在地理空间上的影响关系分布。
基于以上研究,本研究首先通过实地采集夜间街景数据并结合深度学习技术,提取基于跑步者视野的夜间街道环境视觉要素;其次,通过人机对抗评分平台收集 6 个夜跑环境视觉感知指标的得分数据,以分析各感知指标的空间分布特征;最后,综合感知得分数据与夜间街道环境视觉要素,应用 GWR模型分析夜跑环境视觉感知和街道环境要素的关系。本研究旨在探讨:1)城市街道夜跑环境视觉感知在空间分布上呈现出何种特征?2)影响夜跑环境视觉感知的街道环境要素是什么,以及这些环境要素在不同的街道上存在着怎样的差异?
1 研究区域概况与研究方法
1.1 研究区域
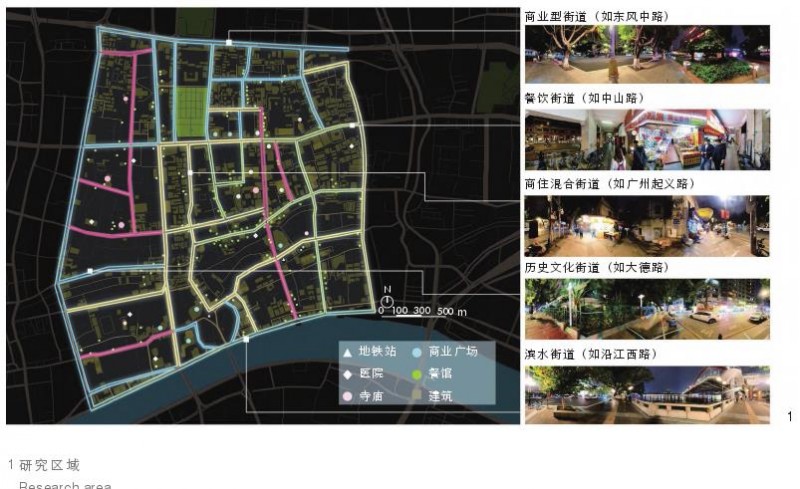
本研究场地位于广州市越秀区核心区域 (图 1)。作为珠江三角洲地区的中心城市,广州市的常住人口数量超过 1 873 万,其中越秀区人口约有 103 万[29]。受亚热带海洋性季风气候影响[30],广州的日间平均气温为 27 ℃,夜间平均气温为 20 ℃[31],为夜间跑步活动创造了舒适宜人的环境。根据人民网联合发布的《2022 国民健身趋势报告》[32],广州位列全国十大运动活力城市,市民也积极参与夜间跑步活动。其中,越秀核心区内道路类型多样,绿化景观丰富,作为研究区域具有一定代表性。
1.2 数据收集与指标选择
1.2.1 街景图像采集
为了更真实地模拟夜跑者的夜间视觉感知体验,本研究选择了身高<165 cm 的志愿者,旨在更接近普通夜跑者的视角高度。街景图像采集于 2023 年 2—3 月的非阴雨天晚间 19:00—22:00 进行,两人成组手持全景相机(Insta360 ONE X2),沿着利用高德地图软件预先规划的街景网络人行道步行(路线总计约 61.58 km),录制带有地理坐标的夜景视频。经 Insta360 Studio 和 Python 后期处理,将影像色彩增强后的夜景视频每隔 5 m 截取一张照片,并调整图像曲线畸变。此外,为保证夜景照片与采集位置在空间关系上一一对应,借助 Arc GIS 在 WGS1984 坐标系下进行空间校准,按抽帧数量生成与街景图像相匹配的地理坐标数据。最终共获得图像12 316 张,图像尺寸为 2 048 像素×512 像素,水平视野为 360°。
1.2.2 夜跑环境视觉感知评估
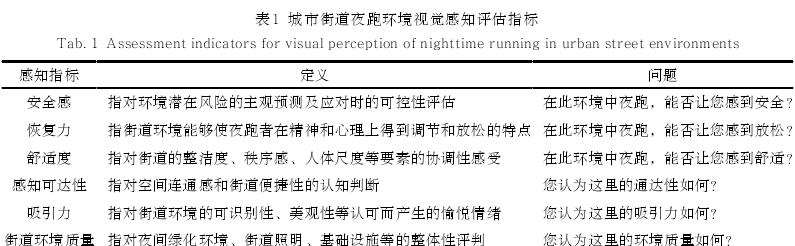
有学者已经探讨了可能影响跑步的不同维度,如强调道路表面类型对跑者安全性的影响[23],或是注重街道建成环境对跑步路线选择的影响[33] 等,但少有研究聚焦于夜跑者的主观感受。因此本研究通过对越秀核心区内进行街头采访,获得夜跑人群对街道环境的感知偏好,以安全感、恢复力、舒适度、感知可达性、吸引力以及街道环境质量 6 个感知指标评估夜间街道环境对夜间跑步者的影响(表 1)。
参考已有研究[34-35],首先,招募了对本研究感兴趣的 90 名志愿者开展人视街景图像采集工作。基于《广州市城市道路全要素设计手册》[36] 以及研究区域内街道实际情况,将其划分为商住混合街道、商业型街道、历史文化街道、餐饮街道以及滨水街道 5 类。其次,基于人机对抗性评分方法[37],筛选出熟悉研究区域且有夜跑习惯的 30 名志愿者(男女比例 1∶1,年龄 18~35 岁),分批次使用人机对抗评分系统,对上述 6 种指标进行夜跑环境视觉感知打分,完成了 30 000 张次的街景图片的评分标记,评分范围为 0~100 分。
值得注意的是,人机对抗评分系统基于随机森林(random forest, RF)模型[38],允许实时训练和迭代调整[39]。当志愿者完成 50 张以上的图像打分后,系统将开始提取照片特征与得分相匹配进行训练,并自动计算推荐分数与实际分数之间的包外估计(out of bag,OOB)均方根误差(root mean squared error,RMSE)[40],i i n yiypredi式中: 代表第 张图像, 代表图像总数, 表示志愿者的评分值, 表示 RF 模型的推荐值。当超过 5 张的图像推荐得分与志愿者提供的分数间的偏差超过 10 分时,模型会重训练进行自我校准。最终,当 ERMSE<5 分时,评分过程停止,输出包括图像特征和感知得分在内的 RF 集来拟合数据集。
1.2.3 城市街道环境要素提取
本研究选择图像语义分割和目标检测技术方法提取夜间街道环境视觉要素。其中,图像语义分割基于全卷积神经网络(fullyconvolutional networks, FCN)对像素级别的图像分类,定量化分析研究区域各要素(如建筑、绿地、道路等)在夜景照片中的比例关系[2];而目标检测技术则是借助 PP-YOLOE 模型,准确识别并定位图像中如车辆、行人、信号灯等视觉要素的个数[41]。
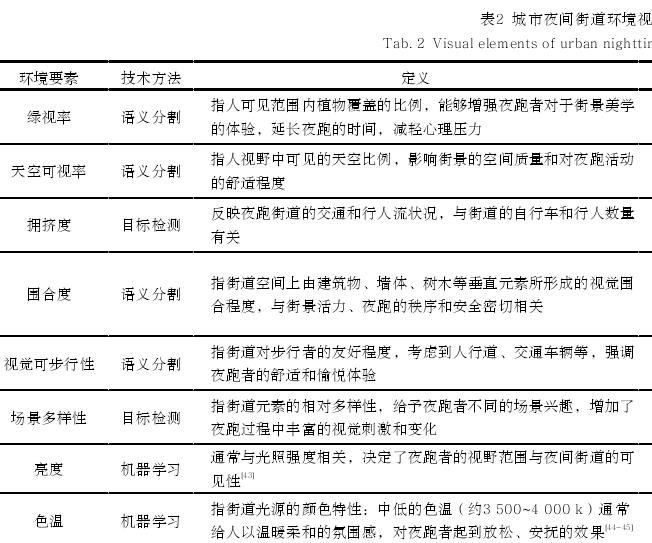
此外,还使用颜色空间转换技术针对灯光特征进行处理与分析:通过机器学习技术提取图片中的 HSV 颜色空间获取相对明度、色度,进而对图像进行灯光区域的识别、分类与等级划分。最后,从包括道路、人行道、建筑、植被等在内的19 个城市夜间街景要素中,提取出后的视觉要素[42-45](表 2)。
1.3 数据分析
本研究使用 Geo Da 1.20.0.8 对越秀核心区夜跑环境视觉感知指标的空间分布特征进行分析。借助全局莫兰指数(Moran’s I)工具,不仅评估了区域内感知指标的聚散或分散状况,还通过应用标准化统计量 Z-score 值有效检验这些指标之间的空间相关性和显著性。
同时,为了更精细地描述每条街道 6 种感知指标各自的聚散特点,利用局部自相关指标(local indicators of spatial association, LISA)来挖掘局部空间信息,从而识别和解读各街道间之间不同类型的空间聚集模式[46],如“高-高”( HH 型 )、“ 低 -低 ”( LL 型 ) 聚 集 ,
以及呈现空间孤立型的“低-高”(LH 型)和 “高-低”(HL 型)聚集情况[47]。
此外,鉴于普通最小二乘(ordinary leastsquares, OLS)回归模型处理空间数据的分布特征和相互影响的局限性[25],本研究在MGWR 2.2 软件中采用 GWR 模型嵌入空间权重矩阵来实现局部回归,有效弥补了 OLS 的缺陷[48];并引入高斯(Gaussian)函数来调整模型中每个采集点的权重,以此反映采集点之间的空间邻近性,旨在深入分析越秀核心区内不同街道中 6 个夜跑环境视觉感知指标与 8 个夜间街道环境要素之间的复杂关系。为进一步提高模型精确度,本研究还采用更正的 Akaike 信息准则(akaike information criterion,corrected, AICc)优化带宽和邻近样点数,以获得更准确的模型复杂度和拟合度量。
2 研究结果
2.1 城市街道夜跑环境视觉感知空间分布特征
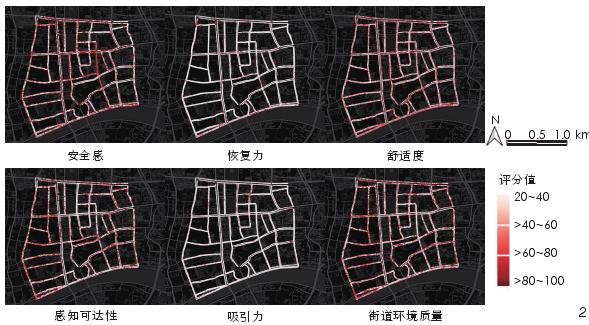
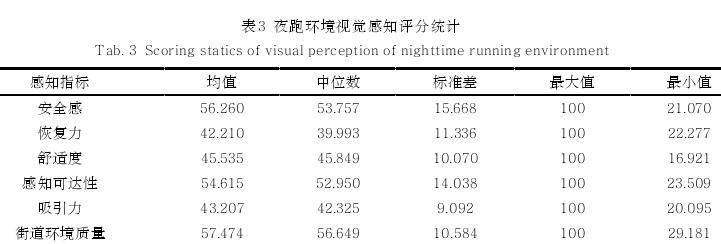
城市街道夜跑环境视觉感知评分结果显示:安全感和街道环境质量得分最高,均值分别为 56.260 分和 57.474 分,超过所有指标的平均水平(49.884 分);35% 和 93% 的街区在这两项指标上得分较高,反映夜跑者普遍感受到较强的安全感和高水平的环境质量。然而,恢复力得分最低,均值仅 42.210 分,低于平均水平;50% 的街区在该指标上仅得20.000~40.000 分,反映夜跑者感受到的恢复力较弱。舒适度、感知可达性和吸引力指标的均值接近总体平均值,各街区得分集中分布在>40.000~60.000 分(表 3,图 2)。综上,广州越秀核心区夜跑环境视觉感知总体处于中等水平,安全感和街道环境质量相对较高,恢复力较弱。
本研究运用全局莫兰指数和局部莫兰指数(Local Moran’s I)的 LISA 聚类分析进一步探究城市街道夜跑环境视觉感知的空间分布特征。安全感、恢复力、舒适度、感知可达性、吸引力和街道环境质量的全局莫兰指数分别为 0.509、0.599、0.607、0.528、0.626、0.494(p<0.001),均具有统计学意义,说明6 种夜跑环境视觉感知指标在广州越秀核心区存在正向的空间相关性且整体表现为中等偏高程度的空间聚集性。
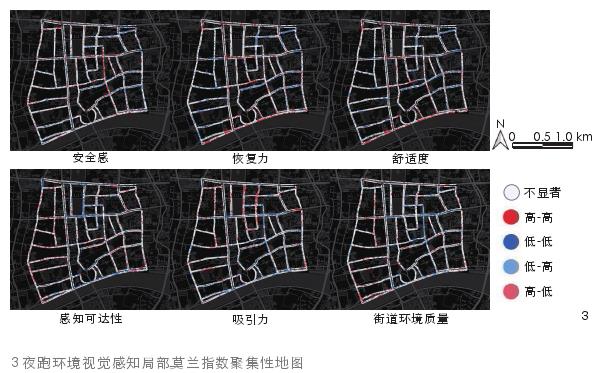
局部莫兰指数结果清晰呈现了不同指标的空间聚集区(图 3)。在 p<0.05 水平下,所有指标均主要表现为高值聚集区和低值聚集区的分布状态。具体而言,安全感、恢复力和吸引力的高值聚集区出现在历史文化街道 (如北京路、百灵路)和滨水街道(如沿江中路),低值聚集区则集中在功能较单一的餐饮街道。感知可达性的高值聚集区分布在邻近六榕寺的历史文化街道,低值聚集区集中在滨水街道(如沿江中路)和功能复合度较低的街道(如连新路)。
此外,街道环境质量和舒适度的高值聚集区位于靠近人民公园的商业型街道,而低值区域聚集在人流量大的历史文化街道。研究发现,北京路街区中的滨水街道和历史文化街道常具有较高的安全感、恢复力和吸引力,这意味着这些区域能够为夜跑活动提供安全舒适的环境,但感知可达性较差。功能复合度不高的街道恢复力、舒适度和环境质量均较低,这可能源于人流密集、交通混乱等的负面影响。而商业型街道的恢复力、吸引力和舒适度较高,这可能是由于其提供了良好的夜跑环境,如平坦的铺装和良好的绿化,使人们更愿意选择这些区域进行夜间跑步。
2.2 城市街道环境要素对夜跑环境视觉感知的影响
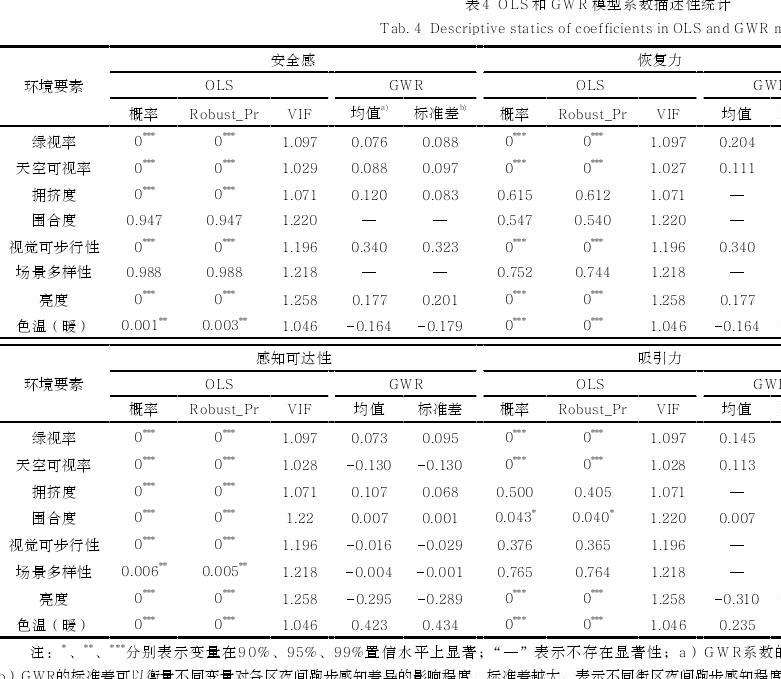
为避免夜间街道环境要素之间相互影响导致估计结果偏差,本研究对各要素进行检验分析,以选择出最优变量用于构建夜跑环境视觉感知的 GWR 模型。利用 OLS 确定研究数据在空间上是否平稳,结果显示,每个街道环境要素的可变膨胀因子(VIF)均小于7.5,表明不存在多重共线性问题(表 4)。根据 Robust_Pr 判断各要素的统计显著性,将显著性 p>0.05 的要素排除在模型构建之外,这一过程有效地排除了变量相关性的干扰,有利于选择出对夜跑环境视觉感知有显著影响的街道环境要素。最后,基于优化后的变量,采用 GWR 模型对夜跑环境视觉感知与城市街道环境要素的关系进行探究。
GWR 模型的各系数统计结果显示(表 4):视觉可步行性对安全感、恢复力和街道环境质量的影响最为显著,视觉可步行性与安全感和恢复力正相关,与街道环境质量负相关,由此可见,视觉可步行性越高,安全感和恢复力越强,而对街道环境质量的视觉感知反而越弱。此外,亮度、绿视率和视觉可步行性对夜间跑步舒适度产生的影响最大。与色温不同,其他街道环境要素均对舒适度有积极影响,这意味着当绿视率、天空可视率、拥挤度、视觉可步行性和亮度较高,色温较冷时,夜间跑步舒适度较高。另外,亮度和色温对感知可达性和吸引力也有非常显著的影响,可达性、吸引力与亮度负相关,与暖光正相关,即较低的亮度和较暖的色温能增强感知可达性和吸引力。
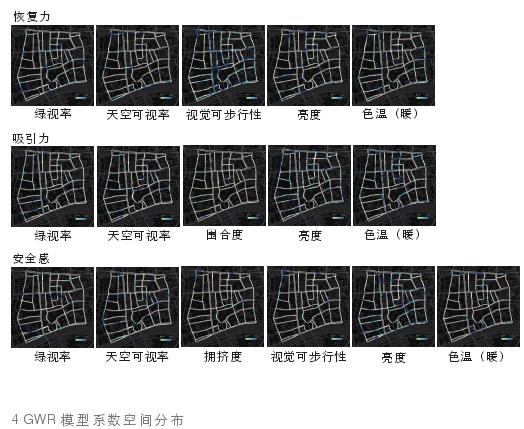
城市街道环境要素与夜跑环境视觉感知之间的 GWR 模型回归系数的空间分布(图 4)结果显示,在不同类型的城市街道中,夜间街道环境要素对舒适度、感知可达性、街道环境质量、吸引力、安全感以及恢复力产生了不同程度的影响。
1)在滨水街道中,舒适度和感知可达性受夜间街道环境要素影响显著:舒适度主要受到绿视率、视觉可步行性和亮度的正向影响,即绿视率、视觉可步行性和亮度越高,舒适度就越高;感知可达性与亮度和暖色温正相关,而绿视率负向影响感知可达性。
2)在历史文化街道中,街道环境质量受到绿视率、天空可视率和视觉可步行性的正向影响;感知可达性和舒适度则主要受到绿视率和暖色温的正向影响。
3)在商业型街道中,吸引力和安全感对夜间街道环境要素的影响最为显著,天空可视率对吸引力有负向影响,绿视率对安全感有显著的正向影响。
4)在功能较单一的餐饮街道和商住混合街道中,吸引力和恢复力较易受夜间街道环境要素影响:吸引力受亮度的负向影响;视觉可步行性和暖色温对恢复力有正向影响。
3 讨论
从夜跑环境视觉感知空间分布特征来看,不同类型街道之间存在差异。研究发现,商业型街道和滨水街道的吸引力、舒适度及街道环境质量普遍高于其他类型的街道,这表明平坦的铺装、良好的绿化覆盖以及滨水景观能更吸引夜间跑步者;历史文化街道具有较好的安全感、恢复力和吸引力,这可能是独特的建筑经夜间照明后呈现不同于白天的魅力,跑步者可以在欣赏建筑之余进行锻炼;然而,餐饮街道和商住混合街道由于人流量大且交通混乱,其恢复力、吸引力及安全感比其他类型的街道更低。
此外,研究进一步发现各类街道环境要素在不同的街道上对夜跑环境视觉感知的影响程度不同,呈现出明显的空间异质性[6]。对于滨水街道,提高亮度和使用暖色调照明可以提升夜间跑步舒适度和感知可达性,这可能是因为提高亮度后,增加了夜跑环境的物体辨识度,减少不安全因素,且温和的照明环境也使人感觉更加舒适。对于历史文化街道,增加绿视率、天空可视率、亮度和视觉可步行性可以促进夜间跑步行为,优美的绿化、开阔的天空视野以及宽敞的人行道将更加吸引跑步者。
对于商业型街道,降低天空可视率可以提高吸引力,尤其是对于靠近城市干道的商业型街道而言,但在人流密集的餐饮街,提高天空可视率可吸引夜间跑步者,而提高亮度却会降低舒适度,这可能由于过高的亮度会产生眩光干扰跑步者视线。另外,在商住混合街道使用暖光照明会降低吸引力,可能因为在复杂的街道环境中,暖光下的物体对比度较弱,跑步者难以注意地面障碍。
综上,本研究为打造夜间跑步友好的街道环境提出以下建议。首先,在规划层面,依据城市不同街道类型夜间跑步环境的视觉感知差异,制定差异化的更新策略。例如,在滨水街道完善灯光照明系统,增加安全标识系统,为夜间跑步者创设流畅舒适的活动环境;在历史文化街道合理布置植被绿化,增设均匀的景观照明,为夜间跑步提供安全而充满活力的空间;在商业型街道设置服务型补给点,打造特色休憩点、社交互动区和临时集散广场,以满足夜间跑步者的需求。其次,在设计层面,基于街道环境特征及规划目标提出改造策略。例如,在滨水街道,设法增加人行道的宽度和长度,提高可步行性;在商业型街道,通过增加垂直绿化以适当提升空间围合度;在历史文化街道,优化照明系统及提高绿化覆盖率,以营造适宜的夜间跑步环境。
4 总结
本研究使用以跑步者为中心的街景图像和计算机视觉技术提取街道环境要素,结合人机对抗评分数据分析街道环境夜跑环境视觉感知空间分布。借助 GWR 模型,评估了街道环境要素对夜跑环境视觉感知的影响。研究结果表明城市街道环境的夜跑环境视觉感知存在空间差异性,并且受到不同环境要素的影响,这为运动友好城市建设相关政策制定与规划设计实践提供了有益参考。
本研究仍存在以下 3 点不足。
1)由于语义分割与目标检测的精度有限,难以对环境要素与夜跑环境视觉感知实现完全准确的识别,所以导致结果可能与实际情况存在偏差,未来可以通过增加夜间数据集、提升算法性能予以提升分析结果准确性。
2)研究的参与者主要选择了年轻健康且有夜间跑步习惯的成年人,而未考虑参与者的教育程度、收入水平及职业背景等个人属性,这导致夜跑环境的感知评分无法代表研究区域所有跑步者的真实感受;未来的研究还应确保参与者样本的多样性,覆盖更广泛的夜跑人群特征。
3)仅考虑了街道空间和视觉环境要素,忽略了其他潜在的影响;未来的研究应综合考虑包括空气污染、天气、噪声等相关变量的影响。
