如何量化街道繁复程度?解析九大城市街道视域景观指数筛选体系
摘要:本文探讨了城市街道视域景观指数的筛选与计算方法。通过对全景静态图数据的应用,研究筛选出9个具有不同景观学意义的视域景观指数。重点介绍了基于计算机视觉尺度不变特征转换(SIFT)提出的新指数——关键点邻域尺度区间频数(KPSF),并验证了其在表征街道视域对象繁复程度方面的有效性,为城市街道景观的量化分析提供了科学依据。
关键词:城市街道;视域景观指数;KPSF;SIFT算法;全景静态图;景观评价
2.1.1 视域景观指数筛选
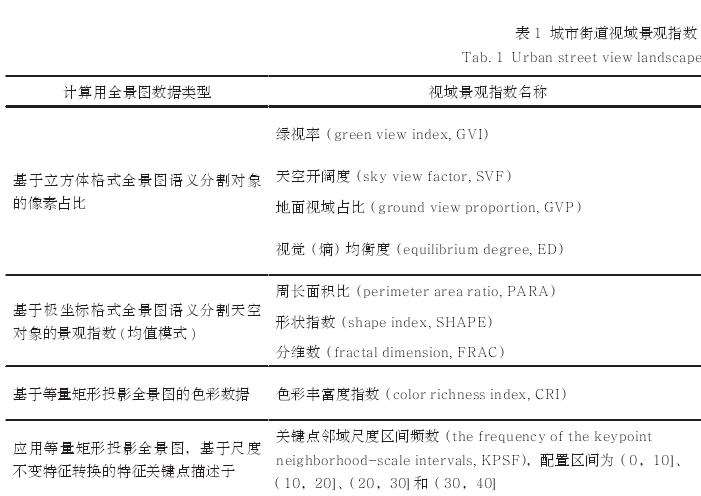
单个视域景观指数可以反映该指数所体现的景观学意义下城市街道特征,而代表不同景观学意义的所有指数共同作用下的城市特征则是所有特征的组成体现。因此视域景观指数筛选时,在应用全景静态图数据这一条件下,尽量区分各个指数所体现出来的景观学意义,基于此本研究筛选出9个视域景观指数(表1)。
2.1.2 视域景观指数计算
KPSF为基于计算机视觉尺度不变特征转换提出的新视域景观指数,如果有关键点邻域尺度区间集合为式中SKP为可探测到的所有关键点邻域尺度,xk为各个关键点邻域尺度大小,位于区间(i,j];则集合K的基数fKPS表示为式中fKPS即为KPSF。
计算KPSF,并将结果按照关键点邻域大小划分为(0,10]、(10,20]、(20,30]和(30,40]4个区间,描述为小尺度、中尺度、较大尺度和大尺度。计算结果显示,当图像内的对象为窗户的角点、招牌的边缘等实际当中较为细碎的对象时,所提取的边缘特征的邻域尺度较小;当对象为天空、成片的墙面等时,所提取的边缘特征的邻域尺度则较大。因此SIFT关键点邻域尺度大小一定程度上反映了街道视域空间繁复的程度。
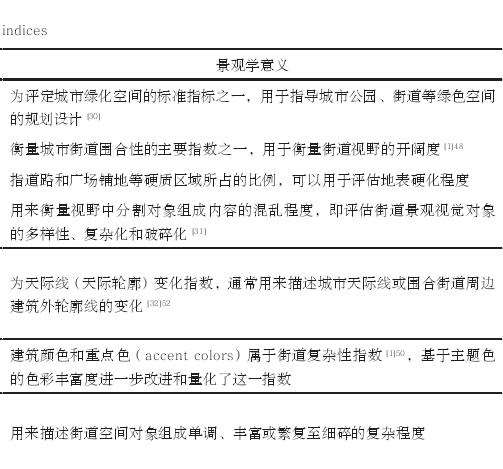
如果图像关键点某一区间的邻域尺度频数接近,则这些图像在该区间具有相似繁复程度的空间对象。基于SIFT算法计算图像各关键点邻域尺度区间频数(图2),结果为:图2-1区间(0,10]为581,(10,20]为155,(20,30]为55,(30,40]为32;图2-2区间(0,10]为97,(10,20]为23,(20,30]为36,(30,40]为20。为在图中可视化频数分布,将位于区间(0,10]的关键点标识为蓝色空圈;而不在该区间的所有关键点标识为红色圆点,圆点大小表明了关键点的大小。
从结果来看,图2-1的(0,10]区间频数最大,次之为(10,20],说明街道视域空间对象较为细小且繁复程度高,这与图2-2形成鲜明对照,因此说明基于SIFT算法提出的新视域景观指数能够表征街道视域对象的特征。