西湖行宫园林遗址本体信息数字化采集
杭州市文物考古所分别于2008、2009年对行宫遗址进行考古工作,调查勘探结果表明行宫园林整体格局保存完整,可反映其乾隆盛期的空间格局。因此,本研究尝试通过数字化采集手段获取遗址信息,并根据采集到的园林空间数据做进一步分析。
2.1技术选择
目前,以摄影测量技术和三维激光扫描技术为代表的数字测绘方式是文化遗产数据采集的主流技术,这2种数字测绘技术各有优势(表1)。在测绘工作中,需具体结合测绘对象的特点和实际情况选取合适的测绘方式。
西湖行宫园林遗址处于杭州西湖风景名胜区的飞行管控区域,禁飞无人机;加之场地内种植了大面积乔木,较大的树木冠幅使得无人机在空中拍摄时易受遮挡,并且树木多为常绿树,即使在冬季进行测绘也无法避免干扰,因而实施无人机倾斜摄影测量的可行性较低。手持三维激光扫描仪普遍应用于小型物体的测绘与记录,对于大型园林的测绘并不适用。因此,本研究以地面三维激光扫描技术为主,结合地面近景摄影测量技术对西湖行宫园林遗址本体进行数字测绘。
2.2实地测绘与数据采集
2.2.1测绘范围与站点分布
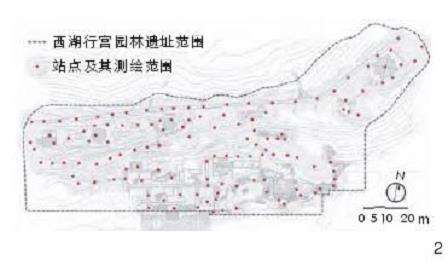
据考古报告测算,西湖行宫园林遗址范围南至行宫宫殿区北侧院墙、东至孤山顶部四照亭、西至平台、北至孤山山脊[2],本研究以上述遗址范围作为测绘范围。每个站点的扫描半径均大于5m,因此站点以10m左右为距进行布置,所设站点共128个(图2)。
2.2.2数据采集
使用FAROFocusS70地面三维激光扫描仪于2022年2月对西湖行宫园林遗址进行非接触式扫描,采集园内建筑、道路、泉池、假山、植物等景观要素的三维空间信息。采集时,以10.9MPts/3x的分辨率/质量进行扫描,为更准确表现遗址细节,在主要景点区域将分辨率/质量提高至28.0MPts/4x。扫描工作选择在晴天的工作日进行,共历时7天。
2.3数据处理
利用SCENE2019.0软件对原始点云数据进行预处理和点云配准:首先,由于原始点云数据量过大,需将原始数据文件进行分组预处理;然后,应用扫描仪拍摄的图像数据对扫描点进行着色;最后,利用SCENE2019.0软件,根据各站点的扫描重合率提取地物特征点执行自动配准,未能自动配准的站点在三维视图内进行手动配准。上述操作的处理成果可合并为一个数据集,误差为6mm。