旋向装置的设计
本研究主要是针对花盆口径 120mm、底径 90mm、高度 90mm 的盆栽花卉,设计分级旋向装置。输送机构输送带选用台达 CEMA - C30604ES 型伺服电机驱动,电机驱动器为 VFD015M21A 型,可有效保证输送带的启停准确稳定,且运行速度调节便利。依据 90mm 的 花 盆 底 径,选 取 输 送 带 宽 度 为150mm,输送带总长度根据实际工作情况确定。
旋向装置( 见图 4) 输送带由两对称旋向输送机构组成,现以其中一机构为例说明旋向装置的设计。两驱动电机电机型号选用 63B14 三相异步电动机,减速器选用型号为 NMRV30 减速比为 15 的减速器。为使电机转速实现实时可调,选用欧姆龙 OMRON 3G3JZ- A4007 变频器对三相电机调速。
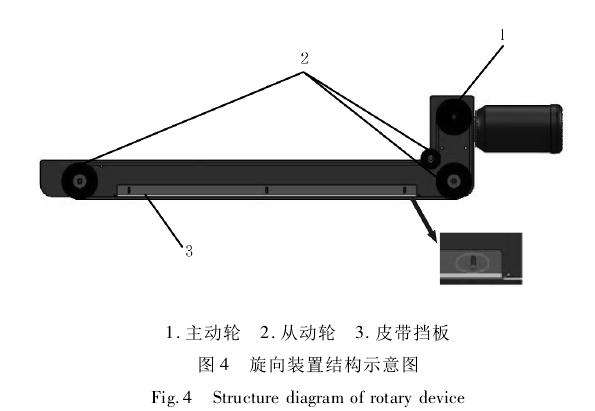
根据花盆高度,旋向输送带宽度选为 20mm,带的形式选取 5mm 厚( 花纹高 2mm、底带厚 3mm) ,表面有草型花纹 PVC 胶面输送带。该输送带最大的优点是:表面摩擦因数大,使花盆和旋转皮带之间有足够的摩擦力,在推动盆花旋转的同时以一定的速度前进; 弹性系数与其它种类的皮带相比相对较大,可以在增大摩擦的同时减少对花盆的损坏。
为保证花盆进入旋向装置以后皮带与花盆之间有足够的摩擦,使盆花成功地从旋向机构通过,设计了皮带挡板。为了使该装置能够适应更多尺寸规格的花盆,皮带挡板固定位置设计成可进行微调的形式,因此皮带挡板与旋向机构挡板之间的连接采用螺栓连接,并在皮带挡板上的固定孔设计出 20mm 的调节长孔。
3 试验与讨论
花盆在旋向装置中的运动方式主要由旋向装置决定,基本不受输送部分的输送带影响。为了考察花盆在旋向装置中旋转速度、前进速度与两条旋向皮带速度之间的关系,设两条旋向皮带速度分别为 V1、V2。理论及实际试验证明: 当两条旋向输送带的速度数值相同、旋向相反时,花盆在原地旋转而不前进。该情况在实际生产中是没有实际意义的,所以在试验中只考虑当两条旋向输送带速度值不同的情况。
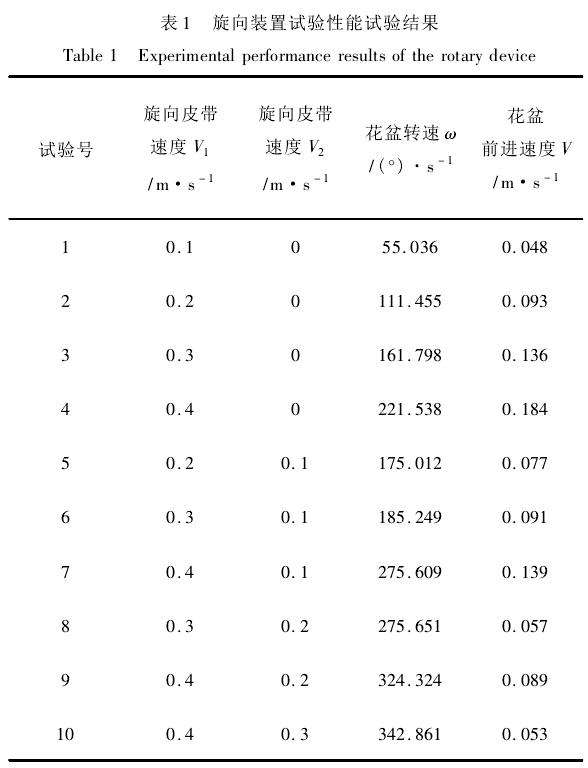
试验结果如表 1 所示。·681·
通过上述试验测得在实际工作情况下的花盆旋转速度 ω 和花盆的前进速度 V,并且用试验证明了理论推算的正确性。
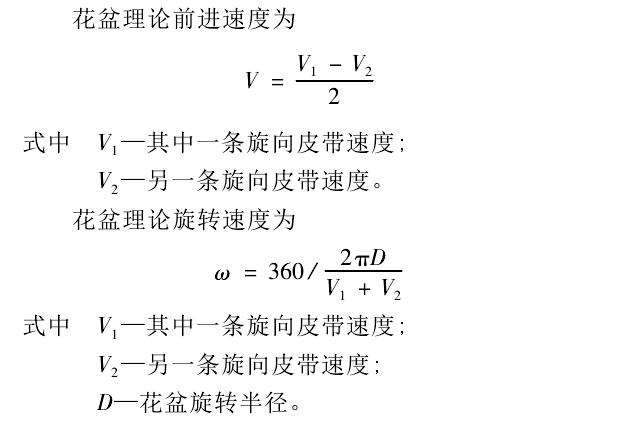
在此,重点解释说明花盆的旋转半径 D。由于盆花在旋向装置中的运动形式是以旋向装置中速度慢的一边为圆心旋转,此时理论上的旋转半径为花盆与旋转装置相互运动是所接触圆的直径。实际工作中,由于花盆在旋向装置中受到来自旋向皮带及皮带挡板的挤压,花盆在旋向装置工作时的实际值小于理论值。本试验中,实际工作状态下的 D 的值为 90mm。
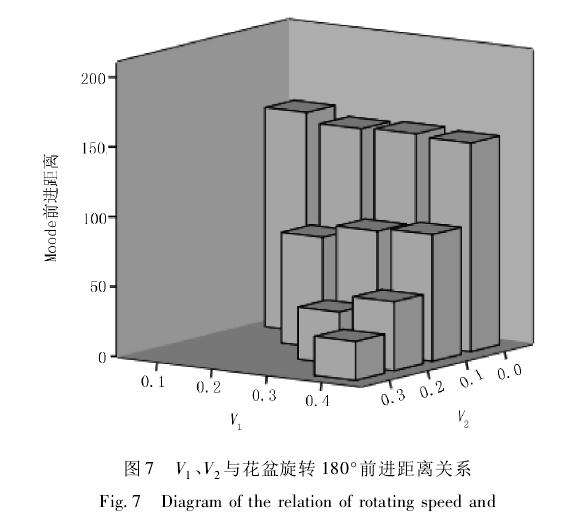
根据试验结果得到V1、V2与花盆旋转速度关系(见图6):花盆的旋转速度与V1与V2大小的和成正比,由试验3、试验5、与试验4、试验6,以及试验7、试验8分别进行比较,可验证该结论的准确性。
4结论
1)旋向装置通过旋转花盆,利用单个相机可获取盆栽花卉不同旋角方向的综合图像信息。
2)当旋向装置的两旋向输送带速度差在0.1m/s范围内情况下,花盆旋转180°获取图像的行走距离为160mm,即视觉相机的视场宽度需要160mm。
